







RB-SUMMIT
Plataforma móvil ideal para investigación en entornos de interiores y exteriores.
Curso gratis: Cómo manejar RB-SUMMIT con ROS. Con al compra de un RB-SUMMIT te regalamos una licencia anual en la academia online The Construct.
Componentes opcionales
VERSIÓN ESTÁNDAR
- CPU i7
- 2D Láser Tim571
- Cámara RGBD Intel D435f
- 4G Router (Rutx11)
- IMU VectorNav
- GPS UBlox
- Batería 15Ah@48V
- Estación de carga
RB-SUMMIT es robusta plataforma móvil que permite incorporar, además de ruedas convencionales (configuración skid), ruedas mecanum con un sistema de suspensión independiente y configuración omnidireccional.
La configuración omnidireccional dispone de ruedas mecanum montadas sobre un sistema de suspensión independiente. Las ruedas mecanum se pueden cambiar por ruedas convencionales (montaje en llanta), consiguiendo de esta forma cambiar rápidamente de una configuración omnidireccional de interiores a una configuración skid-steering versátil tanto en interiores como en exteriores.
Por su parte, la odometría se calcula haciendo uso de los codificadores incrementales de las ruedas y un sensor angular de alta precisión montado en el interior del chasis. La plataforma puede soportar cargas más pesadas (hasta 65Kg) que la versión estándar RB-SUMMIT.
Cuenta con amortiguadores que pueden ser montados en varias posiciones para modificar el espacio libre entre el chasis y el suelo (clearance) del robot. El robot puede navegar autónomamente o ser teleoperado mediante una cámara Pan-Tilt-Zoom que transmite el vídeo en tiempo real.
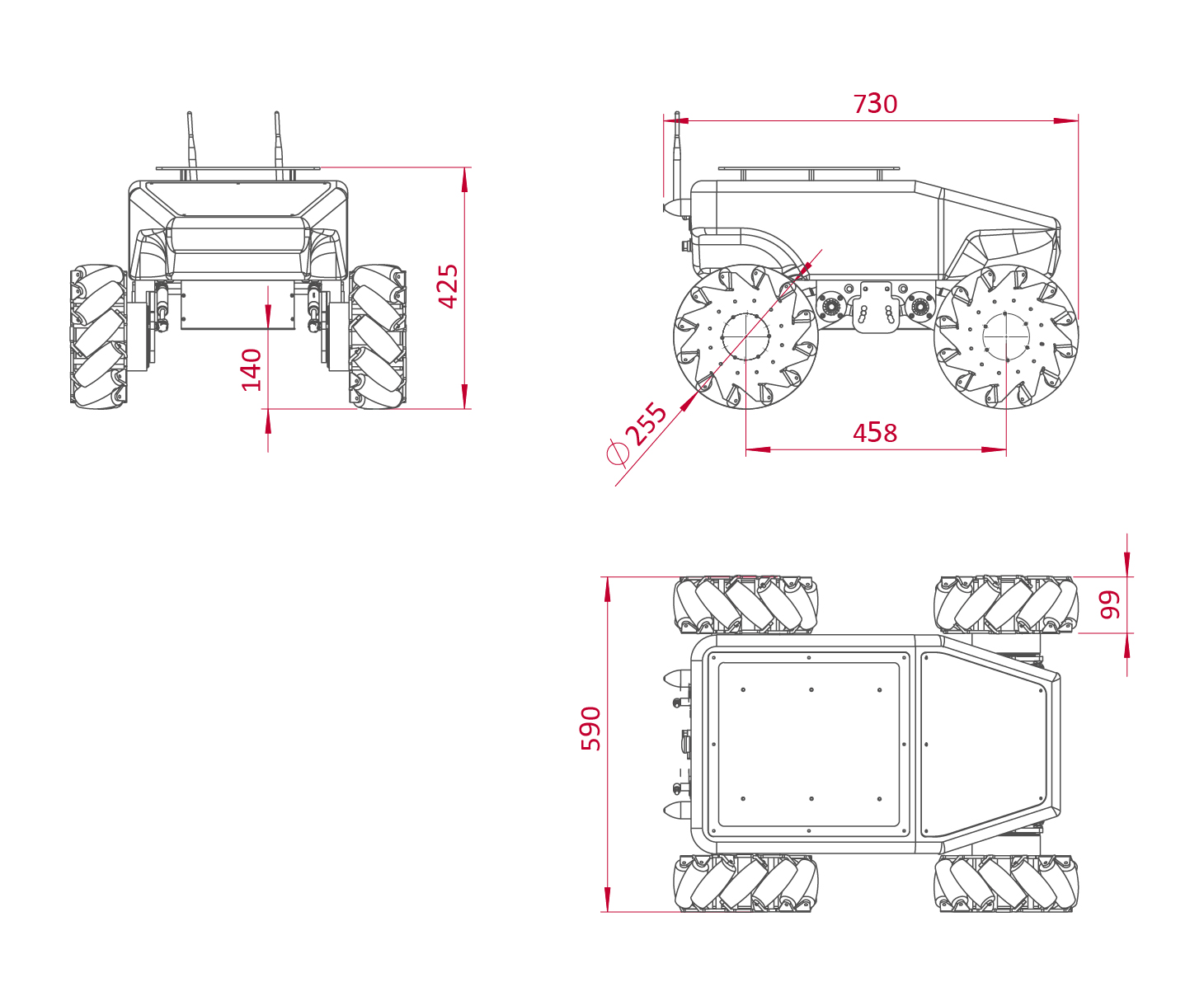
Dimensiones:
.jpg)
Aplicaciones:
- Investigación
- Vigilancia
- Militares
- Monitorización remota
- Acceso a entornos adversos
| Nº Modelo | SUMMIT-XL |
| Temperatura / Humedad | -10°C a +45°C |
| Dimensiones | 720 x 614 x 416 mm |
| Peso | 65 Kg |
| Velocidad | 3 m/s |
| Grado de protección IP | IP53 |
| Capacidad de carga | 65 Kg |
| Control | Arquitectura abierta en ROS | PC integrado con Linux |
| Sistema de tracción | Skid steering / omni directional (mecanum) |
| Motores de tracción | Servomotores brushless 4 x 500 W |
| Autonomía | 10 h continuo movimiento |
| Máxima pendiente | 80 % |
| Baterías | LiFePO4 15Ah@48V |
| Ambiente | Interiores/Exteriores |
| Comunicación | Wifi 802.11n |
| Conectividad | Interna: USB, RS232 y GPIO Externa: USB, RJ45,12 VDC y batería |
Paquetes oficiales para ROS:
- http://wiki.ros.org/Robots/SummitXL
- Fuentes:
- https://github.com/RobotnikAutomation/summit_xl_sim
- https://github.com/RobotnikAutomation/summit_xl_common
- Versiones soportadas: Hydro, Indigo, Kinetic







