





RB-STEEL
Plataforma móvil con una excelente estructura mecánica de acero que permite llevar cargas pesadas de hasta 250 kg
Con la configuración recomendada lleva integradas 2 uds. del láser UST-20LX y una Orbbec Astra
Curso gratis: Cómo manejar RB-STEEL con ROS. Con al compra de un SUMMIT-XL STEEL te regalamos una licencia anual en la academia online The Construct.
Componentes opcionales
RB-STEEL es una plataforma robótica destinada a I+D en aplicaciones enfocadas principalmente para interiores. De ella destaca su robusto diseño, que puede soportar hasta 250 kg de carga.
La plataforma móvil tiene cinemática cinemática omnidireccional basada en 4 ruedas mecanum motrices de alta potencia. Cada rueda integra un motor sin escobillas con caja de cambios y un codificador (opcional). La odometría está compuesta por un sensor de alta precisión angular montado en el interior del chasis y mediante el uso del sensor de la rueda.
El robot puede navegar de manera autónoma o de forma remota a través de una cámara PTZ que transmite vídeo en tiempo real.
Los accesorios estándar incluyen el escáner láser Hokuyo y kits RTK-DGPS. Así mismo, posee conectividad interna (USB; RS232, GPIO y RJ45) y externa (USB, RJ45, tomas de 5, 12 VDC y batería) para poder acoplar fácilmente todo tipo de componentes.
Aplicaciones:
- Investigación
- Vigilancia
- Militares
- Monitorización remota
- Acceso a entornos adversos
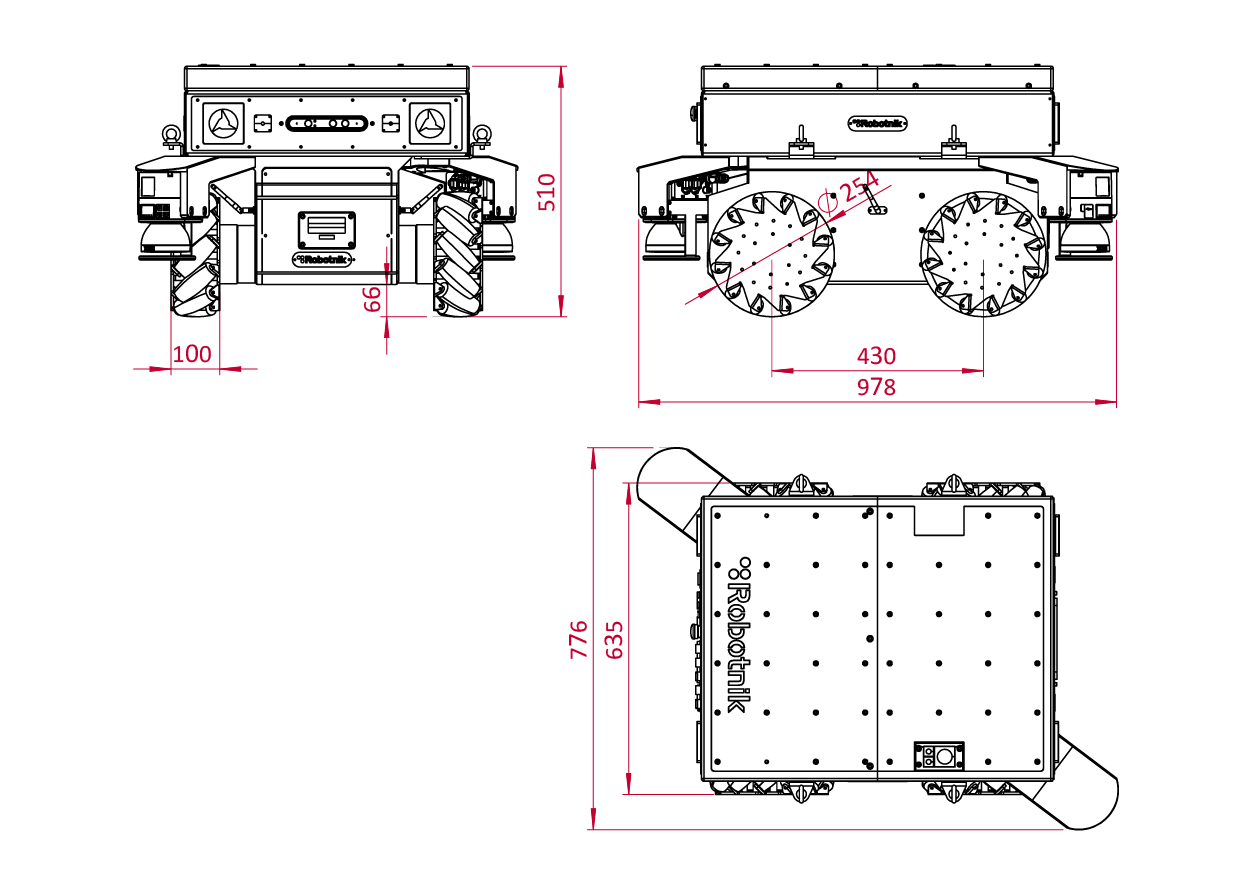
Dimensiones:
Configuración recomendada:
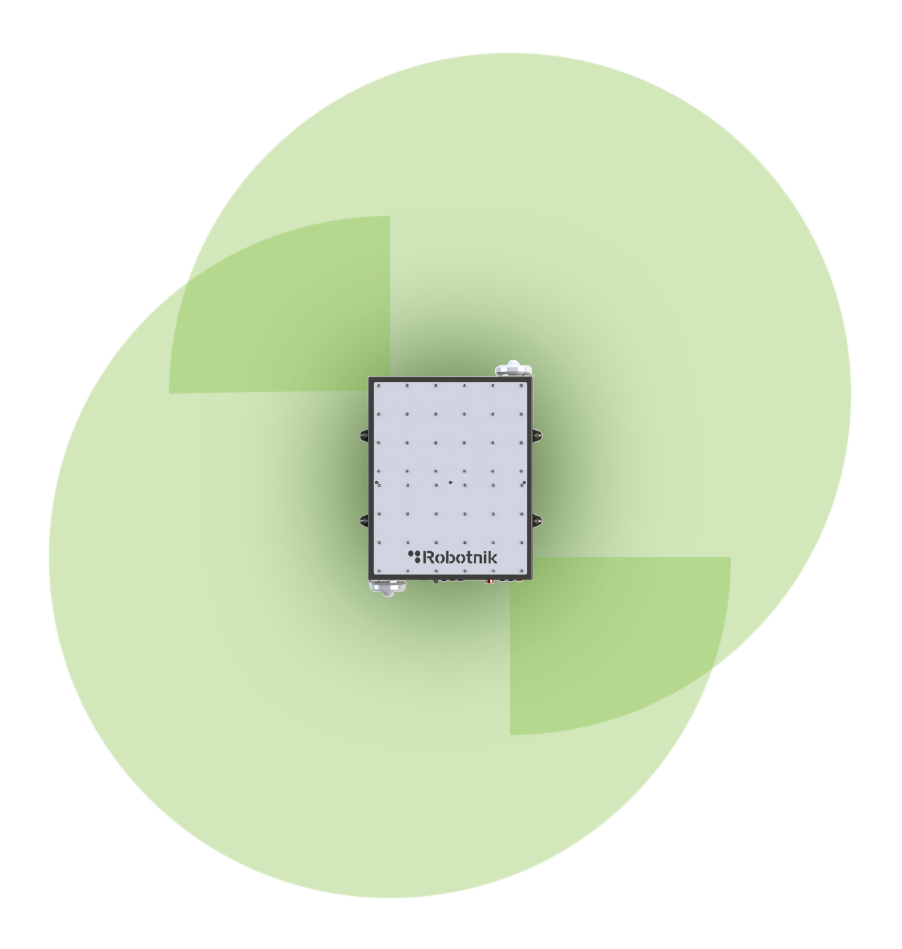
Integración de dos láseres como mínimo para un mayor rango de visión.
Ejemplo de plataforma estándar con dos Láser HOKUYO-10LX (Visión 270º como se observa en la imagen inferior) y dos CAMERA PTZ AXIS 5013 ZOOM 3x (una en frente y a la parte de atrás de la plataforma móvil.
Rango visión láser:
* La plataforma móvil puede ser configurada según necesidades del cliente.
| Nº Modelo | SUMMIT-XL STEEL |
| Temperatura / Humedad | 0º a +50ºC |
| Dimensiones | 978 x 776 x 510 mm |
| Peso | 105 Kg |
| Velocidad | 3 m/s |
| Grado de protección IP | IP52 / IP64 |
| Capacidad de carga | 130 kg / 250 kg |
| Control | Arquitectura abierta en ROS | CPU integrado con Linux |
| Motores de tracción | 4 x 500 W Servomotores sin escobillas con freno de seguridad |
| Autonomía | 6 / 12 h |
| Máxima pendiente | 30º |
| Baterías | LiFePO4 15Ah@48VDC |
| Ambiente | Interior |
| Comunicación | WiFi 02.11a / b / g / n / ac Bluetooth 5.1 |
| Conectividad | Interno: USB, RS232 y GPIO; Externo: USB, RJ45, tomas de 5, 12 VDC, y batería |
- Paquetes oficiales para ROS:
- summit_xl packages
- Fuentes: https://github.com/RobotnikAutomation/summit_xl_sim
- Fuentes: https://github.com/RobotnikAutomation/summit_xl_common
- Versiones soportadas: Melodic y Kinetic.










